Adimec's Three 25-Megapixel Cameras: Frame Rates and Sensor Differences
Adimec provides three distinct 25-megapixel cameras, each tailored for different imaging needs. The primary distinction lies in their frame rates: one operates at 32 frames per second (fps), another reaches up to 72 fps, and the third can achieve an impressive 84 fps.
These variations cater to diverse applications where speed is critical. Choosing between the higher frame rate models requires careful consideration of specific requirements since they might not be as straightforward as selecting based on simple speed alone.
All three cameras utilize sensors from OnSemi: two versions employ the VITA25k image sensor, while one uses the PYTHON25k sensor. The first model (S-25A30) with its VITA25k sensor connects via CameraLink and supports 32 fps. A second model (S-25A70) also features a VITA25k sensor but employs CoaXPress for faster data transfer, reaching speeds of up to 72 fps. The third camera (S-25A80), equipped with the PYTHON25k image sensor and again using CoaXpress, tops out at an exceptional 84 fps.
To help compare these models, here’s a summary table highlighting key specifications:
| Parameter | Units | S-25A30 (VITA) | S-25A70 (VITA) | S-25A80 (PYTHON) |
|---|---|---|---|---|
| Aspect Ratio | 1:1 | |||
| Linear Full Well Capacity (FWC) | Ke- | 13 | 10 | |
| Read Noise (Rn) | electrons | 34 | 14 | |
| Dynamic Range (DNR) | dB | 51.6 | 57.1 | |
| Signal to Noise Ratio | dB | 41.1 | 40.0 | |
| Temporal Sampling Resolution | FPS | 32 | 72 | 84 |
| Parasitic Light Sensitivity (PLS) | 1/900 | 1/6000 | ||
| Quantum Efficiency (%) | % peak | 50 | 50 |
Now, let’s break down these technical parameters:
-
Full Well Capacity (FWC): This indicates the maximum number of electrons each pixel can hold before overflow. Higher FWC generally correlates with a better signal-to-noise ratio and improved performance under high-light conditions but requires more light intensity to achieve optimal linearity across different exposure settings.
-
Read Noise (Rn): Represents noise introduced during image capture, affecting the camera’s ability to detect faint signals. Lower read noise means less sensitivity needed for capturing dim objects.
-
Dynamic Range: Measures a sensor’s ability to distinguish between bright and dark areas in an image; higher values mean greater dynamic range.
-
Temporal Sampling Resolution (FPS): The actual achievable frame rate depends on factors like interface configuration, bit depth, and region of interest. Adjusting these settings could influence the maximum FPS you can achieve.
-
Parasitic Light Sensitivity (PLS): Lower numbers are preferable as they mean less interference from residual images during capture. The PYTHON sensor generally performs better in this category.
-
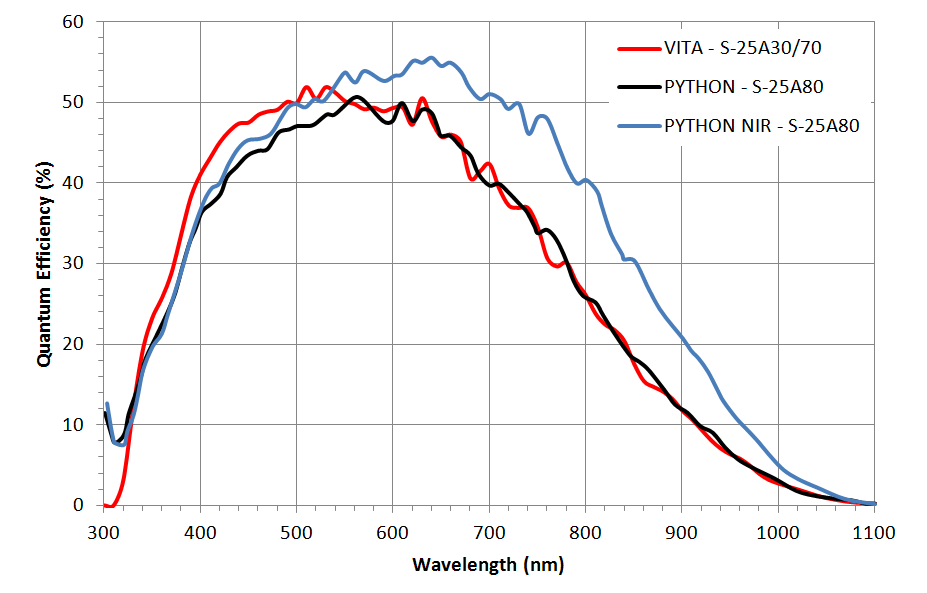
Quantum Efficiency (% QE): Describes how efficiently photons convert to electrons. At longer wavelengths like 600nm, both sensors perform similarly, but performance varies significantly at other wavelengths.
The choice between these cameras ultimately depends on your specific imaging requirements:
If low-light conditions are a priority and minimal image smearing is crucial, look towards the higher FPS model with its superior temporal resolution. For applications where sensitivity to dim light matters most (lower NEI), the PYTHON sensor offers better performance due to its lower read noise.
For instance, at wavelengths commonly used in scientific imaging, such as 600nm, differences become evident between sensors:
- At longer wavelengths like 780nm or shorter ranges including UV (e.g., 300nm), one might prioritize dynamic range. Here, the VITA sensor offers a wider dynamic range.
Whereas at mid-range wavelengths around 600nm where both sensors share identical Quantum Efficiency, the PYTHON25k demonstrates superior sensitivity due to its lower read noise.
Therefore, selecting the right model depends entirely on your application’s requirements and which parameters are most critical.
Last Updated: 2025-09-04 18:46:27