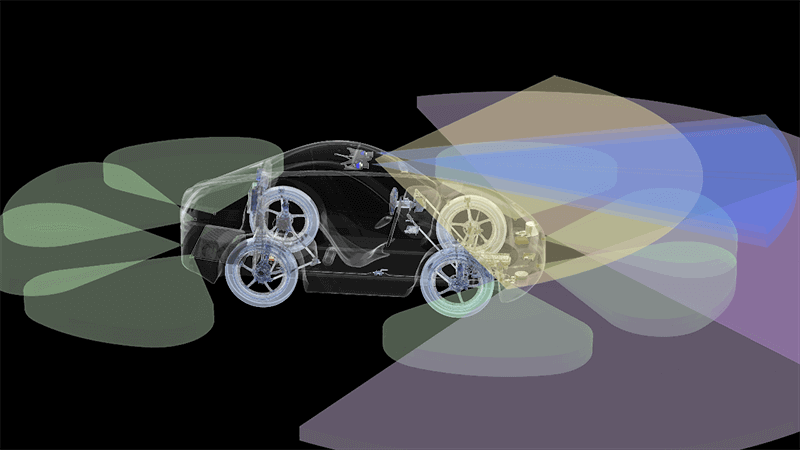
Illustrating Sensor Coverage in Autonomous Driving
The muc018 vehicle concept highlights a key challenge: balancing sensor coverage with system efficiency to support autonomous driving tasks. As part of this initiative, TUfast Eco Team leveraged camera-based sensors to deliver comprehensive 360-degree perception—a critical requirement for safe autonomous navigation.
The Journey of TUfast Eco Team
Since its inception in the early 2000s, TUfast has been a cornerstone of Formula SAE competitions at the Technical University of Munich. In 2010, an offshoot team dedicated to sustainable mobility emerged: TUfast Eco Team. Their breakthrough came with the debut of muc017, their first UrbanConcept vehicle, which secured three first-place finishes in 2017.
Inspired by this success, the team turned its attention to autonomous driving—a complex challenge requiring innovative engineering solutions. With support from The Imaging Source for cameras and accessories, TUfast Eco Team set ambitious goals.
Autonomous Driving Challenges
Participating in multiple competition categories with a single vehicle concept presented significant design constraints. The team needed to maintain low weight while enabling advanced autonomous capabilities. To address this trade-off, they developed a modular system architecture—a solution allowing mission-specific sensors and subsystems to be efficiently integrated or removed as needed.
Stereo cameras became central to their strategy:
“Camera-based data provides critical 360-degree perception necessary for autonomous driving.”
This approach proved decisive during the Shell Eco-marathon, particularly in the Autonomous UrbanConcept Competition. Their vision-driven parking solution relied solely on camera input, supplemented by ultrasonic sensors for precise maneuvering—a feat unmatched by competitors.
Technical Highlights of muc018
The team’s innovation extended beyond sensor integration to system architecture. By adopting a modular design, they achieved remarkable flexibility:
- Autonomous driving subsystems could be seamlessly deployed
- Redundant components were minimized without compromising safety
- Weight optimization was maintained across competition categories
This balanced approach allowed TUfast Eco Team to secure second place overall—just narrowly trailing the champions—in their category.
Future Directions
Looking ahead, the team plans to push boundaries further. Their next research focus includes:
- Depth estimation techniques
- Stereo SLAM (Simultaneous Localization and Mapping) systems
- Advanced perception algorithms
These explorations will prepare them for even more challenging autonomous driving scenarios in the 2019 racing season.
Key Takeaways
The TUfast Eco Team’s journey demonstrates how smart engineering can overcome complex trade-offs:
- Modular design enables flexible functionality
- Camera-based sensing provides robust perception
- Strategic partnerships accelerate innovation
- Iterative refinement balances performance and weight
Their approach offers valuable insights for any team tackling autonomous driving challenges with resource constraints.
Last Updated: 2025-09-05 00:32:03