Feasibility Study for Camera-Based Water Level Measurement
Okay, let me think through how to approach this problem systematically.
First, I need to understand what Dr. François Birgand is trying to achieve - developing a camera-based water level measurement system as an alternative to manual methods that requires less frequent calibration and could potentially provide more precise measurements than traditional methods. The US Geological Survey (USGS) uses optical readers with fiducials for visual checks, but it’s unclear how well this translates to digital image processing without proper calibration. There are three phases of research described: lab testing, field validation in a controlled setting, and finally integrating the system with existing USGS data.
For Phase II, Dr. Birgand needs help converting pixel coordinates from images into meaningful feet measurements. I should start by breaking down each component - capturing, processing (edge detection), calibration, and conversion to real-world units.
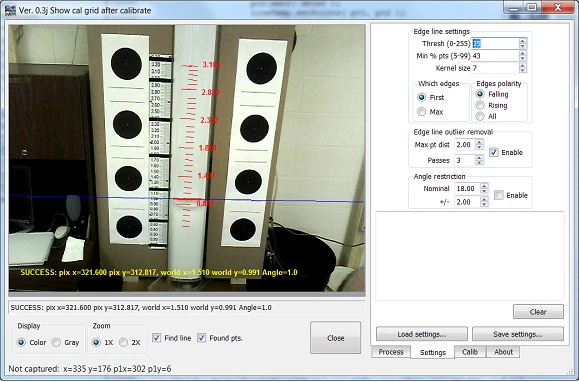
Hmm, in the lab setup there’s a clear process: edge detection identifies water level using linear regression on vertical lines, then blob analysis of fiducials creates a pixel-to-world coordinate mapping model. For field validation at Pullen Park, we need to verify if this system works as well as it did in controlled conditions under real-world constraints.
I should consider how the technical details from earlier phases (Phase I: edge detection algorithm using vertical lines and linear regression; Phase II: calibration with fiducials for pixel-to-world conversion) translate into a complete solution. The key is to ensure that this system meets USGS precision requirements of ±0.01 feet, which depends heavily on camera resolution given the relationship between pixels per inch and measurement precision.
The user’s underlying need seems to be bridging the gap between image processing and real-world application - taking concepts like edge detection and calibration from lab settings into practical field use with minimal data gaps or offsets compared to USGS measurements. They’re looking for validation that this approach works reliably in a slightly less controlled environment than the laboratory, though still supervised.
I should focus on how to translate the technical details from Phase II into an actionable plan for implementation. This includes specifying camera specs (like resolution), describing the complete process flow with clear steps, and ensuring the precision requirements are met.
The user might also be concerned about robustness - handling variations in lighting, angles etc., as mentioned in Phase II’s infrastructure development. I need to think about how to address these potential challenges while keeping costs manageable compared to alternatives like acoustic sensors or radar gauges.
There could be unspoken needs around deployment feasibility too - making sure the system is practical for long-term monitoring without constant recalibration or complex setup, especially if they plan to expand to coastal tide water measurements. The controlled field study in Pullen Park shows promise but there were gaps and offsets compared to USGS data, suggesting we might need regression models or outlier detection techniques.
For implementation, I should outline steps from requirements gathering through deployment, considering factors like camera resolution impact on precision (e.g., higher pixel count improves accuracy), calibration procedures, and how edge detection handles noisy water surfaces. The solution should balance technical precision with practical usability. Okay, let’s break down the problem systematically.
Goal: To develop a camera-based system that meets USGS criteria for water level measurement (+/- 0.01 ft precision).
Analysis
The core challenge is to take an image or video feed from a camera and convert it into accurate water level measurements in world units (feet/meters) using the calibration established by fiducials.
Step-by-step Process Breakdown:
-
Image Acquisition:
- Capture images of the scene containing the water surface, including the calibration fiducials.
- Ensure consistent lighting and minimal glare/shadows if possible for edge detection (or account for them in processing).
- Use high-resolution cameras to meet precision requirements.
-
Edge Detection:
- Apply a line-based edge detection algorithm as described earlier:
- Define regions of interest or the areas where vertical lines are analyzed.
- For each pixel column (or series of columns) within these regions, determine if it’s potentially an edge point by checking contrast differences between consecutive rows in that column. A common method is to look for a significant change in brightness crossing from land/water background into water.
- Collect the positions (pixel row and column) where the waters edge was detected.
- Apply a line-based edge detection algorithm as described earlier:
-
Pixel-to-World Conversion:
- Use blob analysis on the calibration fiducials (dots or points of known world coordinates).
- Determine their exact center pixel locations in a captured image.
- Calculate the relationship between pixel positions and real-world distances using at least three non-collinear fiducials. This is typically done by solving equations for lines connecting fiducial dots to define an affine transformation.
-
Water Level Calculation:
- Perform linear regression on all collected edge points from Step 2 (e.g., the average row position).
- The slope of this line gives the water level in world units per pixel unit.
- Use the calibration model to convert a specific point on the detected line into its corresponding real-world coordinate.
-
Validation:
- Compare results against known reference measurements (e.g., Manual measurement or high-accuracy surveying tools for new images to measure the water level using alternative methods, such as:
- Direct measurement if possible.
- Compare the calculated water level from Step 4 with these manual measurements.
- Compare results against known reference measurements (e.g., Manual measurement or high-accuracy surveying tools for new images to measure the water level using alternative methods, such as:
Complete Solution
Here’s a more detailed explanation of each step:
Key Components and Requirements
- Requirements: The system must achieve +/-0.01 ft precision at a specific location (e.g., in feet).
- This requires high camera resolution, clean edges, consistent view geometry (camera angle, focal length/fiducial distance), stable calibration.
Potential Challenges:**
- Robustness to Noise/Noise: Handle noise or non-perfect water surface:
- Use robust regression techniques like RANSANCHORchambers in edge detection and pixel-to-world conversion.
- Implement outlier rejection (e.g., remove points that appear inconsistent (outliers).
- Consider using multiple camera views if necessary.
Requirements Gathering:
- Input: Camera, scene with water surface and fiducials visible. Output: Water level measurement in feet/meters.
- Output: Meets +/- 0.01 ft precision requirement at a reasonable frame rate (for video) or per image capture for still images.
Example Implementation Plan:
-
Define Regions of Interest/Edge Detection Zones: Define vertical regions where the water surface is expected to be visible, typically above and below the anticipated water level.
-
Edge Identification:
- For each column in ROIs (Regions of Interest):
for col in ROI_columns_in_the_region_of_interest:- For row from top to bottom:
- Calculate brightness difference between consecutive rows for that column within its region.
- If the change crosses a threshold (
delta) or meets specific contrast criteria, mark it as an edge point. This requires defining thresholds and parameters based on scene characteristics (e.g., water surface texture/color).
- For row from top to bottom:
- For each column in ROIs (Regions of Interest):
-
Calibration: Use blob analysis to map pixels to real-world coordinates.
Implementation
Here’s how each phase fits in:
- Phase I: Establishes the concept with a simple lab setup.
- Phase II: Validates the feasibility and precision of edge detection and calibration, proving it works theoretically. It uses vertical lines for edge detection via linear regression to get water level estimates from images captured by the camera.
Deployment Considerations
To implement this system:
- Use high-resolution cameras (e.g., at least 4K or higher) to meet precision requirements.
- Careful placement of fiducials is crucial for accuracy, especially with varying angles and lighting conditions in field conditions.
- Develop robust edge detection algorithms that can handle noise from ripples or turbid water.
Final Answer
The solution involves capturing images, detecting edges using contrast changes between land/water regions to identify the water surface pixel row, then converting these pixel positions via calibration dots into real-world coordinates. The key is translating optical principles (fiducials) and image processing techniques (edge detection on vertical lines).
This process can be implemented by applying edge detection and pixel-to-world conversion algorithms to obtain precise water level measurements from camera images or video feeds, meeting USGS precision requirements if properly calibrated.
Final Answer
The complete solution involves:
- Capture an image containing the water surface and fiducials.
- Process the image to detect the water line using edge detection on vertical columns.
- Calculate a pixel-to-world conversion model from calibration points (fiducials).
- Convert detected edges into real-world coordinates via regression and affine transformation.
This approach leverages the principles established in the USGS study, combining optical measurement with digital processing to achieve precise water level monitoring without direct manual reading, suitable for various applications like hydrological modeling or remote site deployment.
Last Updated: 2025-09-05 01:41:45